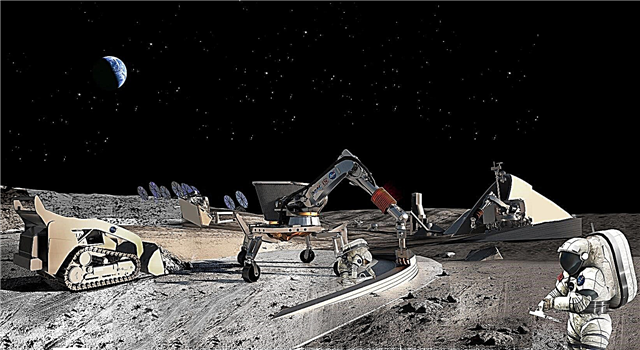
Credito immagine: CMU
Le attuali spedizioni su Marte aumentano la possibilità allettante che possa esserci vita da qualche parte sul pianeta rosso. Ma come lo troveranno le future missioni? Un sistema sviluppato dagli scienziati di Carnegie Mellon potrebbe fornire la risposta.
Questa settimana alla 36a Conferenza sulla scienza lunare e planetaria a Houston (14-18 marzo), lo scienziato Carnegie Mellon Alan Wagoner presenta i risultati della recente esibizione del sistema di rilevamento della vita nel deserto cileno di Atacama, dove ha trovato crescita di licheni e colonie batteriche. Questo segna la prima volta che una tecnologia automatizzata basata su rover è stata utilizzata per identificare la vita in questa dura regione, che funge da banco di prova per la tecnologia che potrebbe essere impiegata nelle future missioni su Marte.
"Il nostro sistema di rilevamento della vita ha funzionato molto bene e alla fine qualcosa di simile potrebbe consentire ai robot di cercare la vita su Marte", afferma Wagoner, membro del team del progetto "Life in the Atacama" e direttore del Centro di biosensori e imaging molecolare presso Mellon College of Science di Carnegie Mellon.
La stagione sul campo "Life in the Atacama" 2004 - da agosto a metà ottobre - è stata la seconda fase di un programma triennale il cui obiettivo è capire come la vita può essere rilevata da un rover che è controllato da un remoto team scientifico . Il progetto fa parte del programma di scienza e tecnologia di astrrobiologia della NASA per esplorare pianeti, o ASTEP, che si concentra sulla spinta dei limiti della tecnologia in ambienti difficili.
David Wettergreen, professore di ricerca associato presso l'Istituto di Robotica di Carnegie Mellon, guida lo sviluppo del rover e le indagini sul campo. Nathalie Cabrol, scienziata planetaria presso il Centro ricerche Ames della NASA e l'Istituto SETI, guida l'indagine scientifica.
La vita è appena rilevabile nella maggior parte delle aree dell'Atacama, ma gli strumenti del rover sono stati in grado di rilevare licheni e colonie batteriche in due aree: una regione costiera con un clima più umido e una regione interna, molto arida, meno ospitale per la vita.
“Abbiamo visto segnali molto chiari da clorofilla, DNA e proteine. E siamo stati in grado di identificare visivamente i materiali biologici da un'immagine standard catturata dal rover ", afferma Wagoner.
“Nel loro insieme, queste quattro prove sono forti indicatori della vita. Ora, i nostri risultati sono stati confermati in laboratorio. Sono stati esaminati i campioni raccolti nell'Atacama e gli scienziati hanno scoperto che contenevano la vita. I licheni e i batteri nei campioni stanno crescendo e sono in attesa di analisi. "
Wagoner e i suoi colleghi hanno progettato un sistema di rilevamento della vita attrezzato per rilevare i segnali di fluorescenza da forme di vita sparse, comprese quelle di dimensioni di pochi millimetri. Il loro riproduttore di fluorescenza, che si trova sotto il rover, rileva i segnali della vita a base di clorofilla, come i cianobatteri nei licheni e i segnali fluorescenti di una serie di coloranti progettati per illuminarsi solo quando si legano all'acido nucleico, alle proteine, ai lipidi o ai carboidrati ? tutte le molecole della vita.
"Non conosciamo altri metodi remoti in grado sia di rilevare bassi livelli di microrganismi sia di visualizzare alti livelli incorporati come biofilm o colonie", afferma Gregory Fisher, scienziato di imaging del progetto.
“Il nostro riproduttore di immagini fluorescente è il primo sistema di imaging a funzionare alla luce del giorno mentre è all'ombra del rover. Il rover utilizza l'energia solare per funzionare, quindi deve viaggiare durante le ore diurne. Molte volte, le immagini che catturiamo possono rivelare solo un debole segnale. Qualsiasi luce solare che penetra nella videocamera di un normale riproduttore d'immagini a fluorescenza oscurerebbe il segnale ”, afferma Wagoner.
“Per evitare questo problema, abbiamo progettato il nostro sistema per eccitare i coloranti con lampi di luce ad alta intensità. La fotocamera si apre solo durante quei flash, quindi siamo in grado di catturare un forte segnale di fluorescenza durante l'esplorazione diurna ”, afferma Shmuel Weinstein, project manager.
Durante la missione, un remoto team scientifico situato a Pittsburgh ha istruito le operazioni del rover. Una squadra di terra sul sito ha raccolto campioni studiati dal rover per riportarli per ulteriori esami in laboratorio. In una giornata tipo sul campo, il rover ha seguito un percorso designato il giorno precedente dal team scientifico delle operazioni a distanza. Il rover si fermava di tanto in tanto per eseguire un'ispezione dettagliata della superficie, creando efficacemente una "trapunta macroscopica" di dati geologici e biologici in pannelli selezionati da 10 per 10 centimetri. Dopo che il rover ha lasciato una regione, la squadra di terra ha raccolto campioni esaminati dal rover.
“Sulla base dei risultati del rover sul campo e dei nostri test in laboratorio, non esiste un esempio del rover che fornisce un falso positivo. Ogni campione che abbiamo testato conteneva batteri ", afferma Edwin Minkley, direttore del Center for Biotechnology and Environmental Processes presso il Dipartimento di Scienze Biologiche.
Minkley sta conducendo analisi per determinare le caratteristiche genetiche dei batteri recuperati per identificare le diverse specie microbiche presenti nei campioni. Sta anche testando la sensibilità dei batteri alle radiazioni ultraviolette (UV). Un'ipotesi è che i batteri possano avere una maggiore resistenza ai raggi UV perché sono esposti a radiazioni UV estreme nell'ambiente desertico. Secondo Minkley, questa caratterizzazione potrebbe anche spiegare perché una percentuale così elevata di batteri dal sito più arido viene pigmentata - rossa, gialla o rosa - mentre crescono in laboratorio.
La prima fase del progetto è iniziata nel 2003, quando un robot a energia solare di nome Hyperion, anch'esso sviluppato presso Carnegie Mellon, è stato portato all'Atacama come banco di prova per la ricerca. Gli scienziati hanno condotto esperimenti con Hyperion per determinare la progettazione, il software e la strumentazione ottimali per un robot che verrebbero utilizzati in esperimenti più approfonditi condotti nel 2004 e nel 2005. Zo ?, il rover utilizzato nella stagione 2004 del campo, è il risultato di quel lavoro . Nell'ultimo anno del progetto, i piani prevedono che Zo?, Dotato di una gamma completa di strumenti, funzioni autonomamente mentre percorre 50 chilometri per un periodo di due mesi.
Il team scientifico, guidato da Cabrol, è composto da geologi e biologi che studiano sia la Terra che Marte in istituzioni tra cui il Centro ricerche Ames della NASA e il Centro spaziale Johnson, l'Istituto SETI, il laboratorio di propulsione a reazione, l'Università del Tennessee, Carnegie Mellon, Universidad Catolica del Norte (Cile), l'Università dell'Arizona, l'UCLA, il British Antarctic Survey e la International Research School of Planetary Sciences (Pescara, Italia).
Il progetto Life in the Atacama è finanziato con un finanziamento triennale di 3 milioni di dollari dalla NASA al Robotics Institute di Carnegie Mellon. William "Red" Whittaker è il principale investigatore. Wagoner è il principale investigatore del progetto di accompagnamento di strumenti per il rilevamento della vita, che ha ottenuto un finanziamento separato di $ 900.000 dalla NASA.
Fonte originale: comunicato stampa CMU