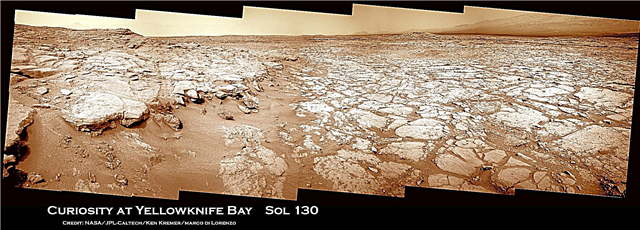
Didascalia: Curiosity esegue la scansione di "Yellowknife Bay" su Sol 130. 17, che è stato cucito insieme dalle immagini della videocamera di navigazione (Navcam). Credito: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Oggi (25 dicembre) Curiosity celebra il suo primo Natale su Marte in un posto chiamato "Yellowknife Bay". È Sol 138 e quasi 5 mesi dall'atterraggio pulsante del 6 agosto 2012 all'interno del cratere Gale. Il robot è in ottima salute.
Nel frattempo sua sorella maggiore Opportunity celebrerà presto un insondabile 9 anni terrestri su Marte in poche settimane il 24 gennaio 2013 - dall'altra parte del pianeta.
Il rover Curiosity della NASA ha raggiunto la depressione superficiale chiamata "Yellowknife Bay" su Sol 130 (17 dicembre 2012) dopo essere sceso di circa 0,5 m lungo un lieve pendio all'interno di una caratteristica geologica chiamata "Glenelg". Guarda i nostri mosaici panoramici dalla baia di Yellowknife - sopra e sotto per una vista di contesto.
Il team scientifico è alla ricerca di una roccia interessante per l'uso inaugurale del trapano a percussione ad alta potenza.
Secondo un nuovo rapporto su SpaceRef, la perforazione è stata ritardata a causa delle preoccupazioni che il riscaldamento per attrito potrebbe potenzialmente causare la liquefazione della roccia a un “miele marziano” appiccicoso che potrebbe ostruire e danneggiare gravemente i setacci ei meccanismi di manipolazione del campione. Pertanto, il team sta rivalutando attentamente il tipo di bersaglio roccioso e le procedure di perforazione prima di impegnarsi nell'uso iniziale del trapano a percussione situato sulla torretta all'estremità del braccio robotico.
Il team ha scelto di guidare fino a "Yellowknife Bay" perché presenta un diverso tipo di terreno geologico rispetto a quello che Curiosity ha guidato in precedenza. L'area "Glenelg" si trova all'incrocio di tre diversi tipi di terreno geologico ed è la prima destinazione scientifica estesa di Curiosity.
La curiosità arrivò al margine della Baia di Yellowknife sul Sol 124 ed entrò nel bacino del Sol 125 (12 dicembre) e scattò una vista panoramica di esplorazione scrutando l'invitante locale. Il rover utilizza inoltre lo spettrometro minerale a raggi X APXS, il laser ChemCam e l'imager per lenti manuali MAHLI per raccogliere i dati iniziali di caratterizzazione scientifica.

La curiosità raggiunge il picco 125 nella baia di Yellowknife, il Sol 125, 12 dicembre 2012. Il rover ha continuato a guidare all'interno del bacino alla ricerca del primo bersaglio di perforazione. Credito: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Finora il rover ha attraversato una distanza totale di guida di circa 700 metri.
La maggior parte del team scientifico e tecnico sta facendo una pausa tanto necessaria per trascorrere del tempo con le loro famiglie dopo aver caricato 11 Sols di attività in anticipo per mantenere il robot ronzio durante le festività natalizie. Un equipaggio di scheletri di JPL sta sorvegliando per far fronte a qualsiasi eventualità.
Una delle massime priorità è l'acquisizione di un panorama a colori Mastcam a 360 gradi ad alta risoluzione. Ciò avrà un valore inestimabile per la selezione del primo obiettivo di roccia in cui perforare e acquisire un campione dall'interno - un'impresa mai tentata su Marte.
"Abbiamo deciso di guidare in un luogo con una buona vista degli affioramenti che circondano la baia di Yellowknife per consentire una buona immagine di questi affioramenti prima dell'interruzione delle vacanze", afferma Ken Herkenhoff, membro del team scientifico rover. "Poiché le immagini vengono restituite durante l'interruzione, possiamo usarle per aiutare a decidere dove eseguire la prima operazione di perforazione."
Il team prevede di scegliere un obiettivo di perforazione nel gennaio 2013 dopo un attento processo di selezione.
Il braccio robotico lungo 7 piedi (2 m) fornirà quel campione iniziale di roccia polverizzata alle porte di ingresso sul ponte del rover per l'analisi da parte del duo ad alta potenza di laboratori di chimica miniaturizzati di nome Chemin & SAM.

Didascalia immagine: La curiosità dispiega un braccio robotico sul Sol 129 ed esamina il rock con strumenti scientifici APXS e MAHLI per caratterizzare la composizione del suolo e della roccia. Questo mosaico composito è stato cucito da immagini Navcam del Sol 129 (16 dicembre) e precedenti sol e mostra la posizione della porta di ingresso del campione Chemin sul ponte del rover. Credito: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
La curiosità trascorrerà almeno un altro mese o più a indagare su Glenelg prima di iniziare il viaggio di quasi un anno lungo verso la sua destinazione principale: gli strati sedimentari dei tratti inferiori della montagna alta 3 miglia (5 km) chiamata Mount Sharp.

Didascalia immagine: Scansione del Monte Sharp dalla Baia di Yellowknife sul Sol 136. Questo mosaico fotografico assemblato dalle immagini della telecamera Mastcam 100 è stato scattato da Curiosity sul Sol 136 (23 dicembre) - dalla sua posizione attuale. Mostra una parte del tumulo stratificato chiamato Mount Sharp, la sua destinazione principale. L'acquisizione di un panorama a colori ad alta risoluzione 360 da Yellowknife Bay è un compito prioritario per il rover durante le festività natalizie. Credito: NASA / JPL-Caltech / Marco Di Lorenzo / Ken Kremer
Mentre il corvo marziano vola, i dintorni mozzafiato del Monte Sharp sono a circa 10 km di distanza.
L'obiettivo della missione è cercare habitat e determinare se Marte avrebbe mai potuto sostenere la vita microbica in passato o presente durante la fase di missione primaria di 2 anni.

Didascalia immagine: Curiosity Traverse Map, Sol 130. Questa mappa traccia dove Curiosity ha guidato tra l'atterraggio in un sito chiamato "Bradbury Landing" e la posizione raggiunta durante Sol 130 (17 dicembre 2012) in un posto chiamato "Yellowknife Bay" che è all'interno di un'area chiamata "Glenelg". L'inserto mostra le gambe più recenti della traversa in modo più dettagliato. Credito: NASA / JPL-Caltech / Univ. dell'Arizona