Microbot planetari. Credito immagine: NASA Clicca per ingrandire
Intervista a Penny Boston, Parte I
Se vuoi viaggiare verso stelle lontane o trovare la vita in un altro mondo, ci vuole un po 'di pianificazione. Ecco perché la NASA ha istituito NIAC, l'Istituto NASA per i concetti avanzati. Negli ultimi anni, la NASA ha incoraggiato scienziati e ingegneri a pensare fuori dagli schemi, a inventare idee proprio da questo lato della fantascienza. La loro speranza è che alcune di queste idee vadano in panne e forniscano all'agenzia le tecnologie che può usare 20, 30 o 40 anni lungo la strada.
NIAC fornisce finanziamenti su base competitiva. Solo una manciata delle dozzine di proposte presentate sono finanziate. Il finanziamento della fase I è minimo, quanto basta per consentire ai ricercatori di concretizzare la loro idea sulla carta. Se l'idea mostra merito, potrebbe ricevere finanziamenti per la Fase II, permettendo alla ricerca di continuare dal puro concetto allo stadio del prototipo grezzo.
Uno dei progetti che hanno ricevuto finanziamenti per la Fase II all'inizio di quest'anno è stata una collaborazione tra il Dott. Penelope Boston e il Dott. Steven Dubowsky per sviluppare "microbot di salto" in grado di esplorare terreni pericolosi, comprese le grotte sotterranee. Se il progetto si espande, un giorno i microbot di salto potrebbero essere inviati per cercare la vita sotto la superficie di Marte.
Boston trascorre molto tempo nelle grotte, studiando i microrganismi che vivono lì. È direttrice del programma di studi sulle caverne e sul carso e professore associato presso la New Mexico Tech di Socorro, nel New Mexico. Dubowsky è il direttore del MIT Field e Space Robotics Laboratory presso il MIT, a Cambridge, nel Massachusetts. È noto in parte per le sue ricerche sui muscoli artificiali.
Astrobiology Magazine ha intervistato Boston poco dopo che lei e Dubowsky hanno ricevuto la sovvenzione NIAC di Fase II. Questa è la prima delle due parti dell'intervista. Astrobiology Magazine (AM): Tu e il Dr. Steven Dubowsky avete recentemente ricevuto finanziamenti dalla NIAC per lavorare sull'idea di utilizzare robot in miniatura per esplorare le grotte sotterranee su Marte? Come è nato questo progetto?
Penny Boston (PB): Abbiamo fatto un sacco di lavoro nelle grotte sulla Terra con un occhio a guardare gli abitanti microbici di questi ambienti unici. Pensiamo che possano servire da modelli per la ricerca di forme di vita su Marte e altri corpi extraterrestri. Ho pubblicato un articolo nel 1992, con Chris McKay e Michael Ivanov, suggerendo che il sottosuolo di Marte sarebbe stato l'ultimo rifugio della vita su quel pianeta man mano che diventava sempre più freddo e secco nel tempo geologico. Questo ci ha spinto a esaminare il sottosuolo della Terra. Quando l'abbiamo fatto, abbiamo scoperto che esiste una straordinaria gamma di organismi apparentemente indigeni nel sottosuolo. Interagiscono con la mineralogia e producono biosignature uniche. Quindi è diventata un'area molto fertile per noi da studiare.
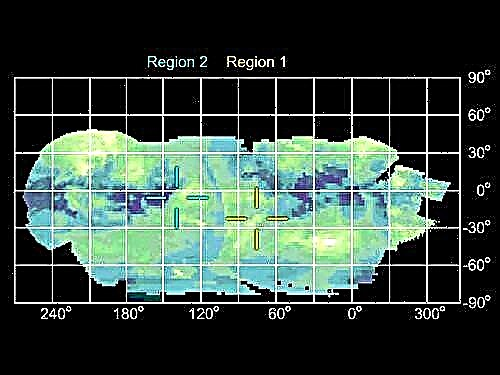
Entrare in caverne difficili anche su questo pianeta non è così facile. Tradurlo in missioni robotiche extraterrestri richiede un pensiero. Abbiamo buoni dati di imaging da Marte che mostrano evidenti evidenze geomorfologiche per almeno le caverne del tubo di lava. Quindi sappiamo che Marte ha almeno quel tipo di grotta che potrebbe essere un utile obiettivo scientifico per le future missioni. È plausibile pensare che ci siano anche altri tipi di grotte e abbiamo un articolo in stampa in un prossimo documento speciale della Geological Society of America che esplora meccanismi unici di speleogenetica (formazione di caverne) su Marte. Il grande punto critico è come muoversi in un terreno così rigoroso e difficile.
AM: Puoi descrivere cosa hai fatto nella prima fase del progetto?
PB: Nella fase I, volevamo concentrarci su unità robotiche che erano piccole, molto numerose (quindi sacrificabili), in gran parte autonome e che avevano la mobilità necessaria per entrare in terreni accidentati. Sulla base del lavoro in corso del Dr. Dubowsky con il movimento robotico attivato dai muscoli artificiali, ci è venuta l'idea di molte, molte piccole sfere piccole, delle dimensioni di palline da tennis, che essenzialmente saltano, quasi come i fagioli messicani che saltano. Accumulano energia muscolare, per così dire, e poi si ribellano in varie direzioni. È così che si muovono.
credito: Render di R.D.Gus Frederick
Impostazione planetaria per l'esplorazione della superficie planetaria e del sottosuolo su larga scala. Clicca sull'immagine per ingrandirla.
Credito d'immagine: Rendering di R.D.Gus Frederick
Abbiamo calcolato che probabilmente potremmo impacchettare circa un migliaio di questi ragazzi in una massa di carico utile delle dimensioni di uno degli attuali MER (Mars Exploration Rovers). Ciò ci darebbe la flessibilità necessaria per subire la perdita di una grande percentuale delle unità e avere ancora una rete che potrebbe fare ricognizione e rilevamento, imaging e forse anche alcune altre funzioni scientifiche.
AM: In che modo tutte queste piccole sfere si coordinano tra loro?
PB: Si comportano come uno sciame. Si relazionano tra loro usando regole molto semplici, ma ciò produce una grande flessibilità nel loro comportamento collettivo che consente loro di soddisfare le esigenze di terreni imprevedibili e pericolosi. Il prodotto finale che stiamo immaginando è una flotta di questi ragazzini che vengono inviati in un promettente sito di atterraggio, uscendo dal lander e poi facendosi strada verso qualche sottosuolo o altro terreno pericoloso, dove si schierano come una rete. Creano una rete di comunicazione cellulare, da nodo a nodo.
AM: Sono in grado di controllare la direzione in cui saltano?
PB: Abbiamo aspirazioni affinché alla fine siano molto capaci. Mentre entriamo nella Fase II, stiamo lavorando con Fritz Printz a Stanford su celle a combustibile ultraminiaturizzate per alimentare questi ragazzini, il che consentirebbe loro di essere in grado di fare una serie abbastanza complessa di cose. Una di queste capacità è avere un certo controllo sulla direzione in cui vanno. Ci sono alcuni modi in cui possono essere costruiti che possono consentire loro di andare preferenzialmente in una direzione o nell'altra. Non è così preciso come sarebbe se fossero rover con ruote che percorrevano un sentiero rettilineo. Ma preferibilmente non possono orientarsi più o meno nella direzione in cui desiderano andare. Quindi immaginiamo che avranno almeno un controllo rozzo sulla direzione. Ma molto del loro valore ha a che fare con il loro movimento di sciame come una nuvola in espansione.
Per quanto meravigliosi siano i rover MER, per il tipo di scienza che faccio, ho bisogno di qualcosa di più simile all'idea del robot degli insetti introdotta da Rodney Brooks al MIT. Essere in grado di attingere al modello dell'intelligenza degli insetti e dell'adattamento per l'esplorazione mi ha attirato a lungo. Aggiungendo ciò alla straordinaria mobilità fornita dall'idea hopping del Dr. Dubowsky, penso, può consentire a una percentuale ragionevole di queste piccole unità di sopravvivere ai pericoli del terreno sotterraneo - che mi è sembrata una combinazione magica.
HB: Quindi nella Fase I, qualcuno di questi è stato effettivamente costruito?
PB: No. La fase I, con NIAC, è uno studio di sei mesi che affatica il cervello, spingendo la matita, per delineare lo stato dell'arte delle tecnologie pertinenti. Nella fase II, eseguiremo un numero limitato di prototipi e prove sul campo, per un periodo di due anni. Questo è molto meno di quello che potrebbe essere necessario per una missione reale. Ma, naturalmente, questo è il mandato della NIAC, per esaminare la tecnologia da 10 a 40 anni. Stiamo pensando che probabilmente è compreso tra 10 e 20 anni.
AM: Quali tipi di sensori o apparecchiature scientifiche immagini di essere in grado di mettere su queste cose?
PB: L'imaging è chiaramente qualcosa che vorremmo fare. Man mano che le telecamere diventano incredibilmente piccole e robuste, ci sono già unità nella gamma di dimensioni che potrebbero essere montate su queste cose. Probabilmente alcune delle unità potrebbero essere dotate di capacità di ingrandimento, quindi si potrebbero guardare le trame dei materiali su cui stanno atterrando. L'integrazione di immagini riprese da minuscole fotocamere su molte piccole unità diverse è una delle aree per lo sviluppo futuro. Questo va oltre lo scopo di questo progetto, ma è quello a cui stiamo pensando per l'imaging. E poi, sicuramente sensori chimici, essere in grado di annusare e percepire l'ambiente chimico, il che è molto critico. Tutto, dai piccoli nasi laser agli elettrodi ionoselettivi per i gas.
Stiamo immaginando di averli non tutti identici, ma piuttosto un insieme, con abbastanza dei diversi tipi di unità equipaggiate con diversi tipi di sensori in modo che la probabilità sarebbe ancora elevata, anche se si considerano perdite abbastanza elevate di numero di unità, che noi avrebbe ancora una suite completa di sensori. Anche se ogni singola unità non può avere un carico utile gigantesco di sensori su di essa, potresti averne abbastanza per poter dare una significativa sovrapposizione con le sue altre unità.
AM: Sarà possibile fare test biologici?
PB: Penso di sì. Soprattutto se immagini il lasso di tempo che stiamo osservando, con i progressi che stanno arrivando online con qualsiasi cosa, dai punti quantici ai dispositivi lab-on-a-chip. Naturalmente, la difficoltà sta nel reperire materiale campione per quelli. Ma quando abbiamo a che fare con piccole unità a contatto con il suolo come i nostri microbot da salto, potresti essere in grado di posizionarle direttamente sul materiale che desiderano testare. In combinazione con microscopia e immagini di campo più ampio, penso che la capacità sia lì per fare qualche serio lavoro biologico.
AM: Hai un'idea di quali siano le pietre miliari che speri di raggiungere nel corso del tuo progetto biennale?
PB: Stiamo anticipando che entro marzo potremmo avere prototipi grezzi con la relativa mobilità. Ma potrebbe essere troppo ambizioso. Una volta che abbiamo unità mobili, il nostro piano è quello di fare prove sul campo in vere e proprie caverne di tubi di lava sulle quali stiamo facendo scienza nel New Mexico.
Il campo è già stato testato. Come parte della Fase I è uscito il gruppo del MIT e ho insegnato loro un po 'di speleologia e com'era effettivamente il terreno. È stato un grande colpo d'occhio per loro. Una cosa è progettare robot per le sale del MIT, ma un'altra è progettarli per ambienti rocciosi del mondo reale. È stata un'esperienza molto educativa per tutti noi. Penso che abbiano una buona idea di quali siano le condizioni che devono soddisfare con il loro design.
AM: Quali sono queste condizioni?
PB: Terreno estremamente irregolare, molte fessure in cui questi ragazzi potrebbero essere temporaneamente bloccati. Quindi avremo bisogno di modalità operative che consentano loro di districarsi, almeno con una ragionevole possibilità di successo. Le sfide della comunicazione line-of-sight in una superficie molto approssimativa. Superare grandi massi. Rimanere bloccati in piccole crepe. Cose di quel tipo.
La lava non è liscia. L'interno dei tubi di lava è intrinsecamente liscio dopo che si sono formati, ma c'è molto materiale che si restringe, si incrina e cade. Quindi ci sono pile di macerie per andare in giro e ancora, e molti cambiamenti in elevazione. E queste sono cose che i robot convenzionali non hanno la capacità di fare.
Fonte originale: NASA Astrobiology