Credito d'immagine: ISRO
Un missile indiano PSLV è partito oggi dal Satish Dhawan Space Center trasportando il satellite di telerilevamento IRS-P6 in un'orbita polare alta 821 km. IRS-P6 è il satellite di telerilevamento più avanzato costruito dalla Indian Space Research Organization (ISRO); monitorerà principalmente le risorse naturali, come l'acqua, l'agricoltura e raccoglierà i dati sulla gestione del territorio.
Nel suo ottavo volo condotto dal Satish Dhawan Space Center, (SDSC), SHAR, Sriharikota, oggi (17 ottobre 2003), il veicolo di lancio satellitare Polar ISRO, PSLV-C5, ha lanciato con successo il satellite di telerilevamento indiano, RESOURCESAT-1 (IRS -P6) in un'orbita sincrona solare polare alta 821 km (SSO). Il RESOURCESAT-1 da 1.360 kg è il satellite di telerilevamento più avanzato e più pesante lanciato finora dall'ISRO. Il PSLV costituisce un componente importante del sistema end-to-end creato da ISRO per la pianificazione e la gestione delle risorse naturali.
Il PSLV-C5 è decollato da SDSC, SHAR, Sriharikota alle 10:22 con l'accensione del primo stadio principale e quattro motori strap-on. I restanti due motori strap-on del primo stadio sono stati accesi a 25 secondi dopo il decollo. Dopo aver attraversato gli eventi di volo pianificati, tra cui la separazione dei motori strap-on illuminati a terra, la separazione dei motori strap-on illuminati ad aria e il primo stadio, l'accensione del secondo stadio, la separazione della carenatura del carico utile dopo che il veicolo ha liberato il atmosfera densa, separazione del secondo stadio, accensione del terzo stadio, separazione del terzo stadio, accensione del quarto stadio e interruzione del quarto stadio, RESOUCESAT-1 è stato iniettato sistematicamente in orbita 1080 secondi dopo il decollo.
RESOURCESAT-1 è stato separato dopo un adeguato riorientamento della combinazione di alloggiamenti del quarto stadio-apparecchiatura per evitare qualsiasi collisione con il satellite. RESOURCESAT-1 è stato posizionato nell'orbita sincrona solare polare (SSO) ad un'altitudine di 821 km con un'inclinazione di 98,76 gradi rispetto all'equatore.
Informazioni su PSLV
Si può notare che il PSLV è stato progettato e sviluppato dall'ISRO per posizionare i satelliti indiani di telerilevamento di classe 1.000 kg nell'orbita sincrona solare (SSO) polare. Dal suo primo volo di successo nell'ottobre 1994, la capacità del PSLV è stata aumentata da 850 kg agli attuali 1.400 kg in 820 km di orbita sincrona. PSLV ha anche dimostrato molteplici capacità di lancio satellitare. Finora ha lanciato sette satelliti indiani e quattro piccoli satelliti per clienti internazionali.
Il miglioramento della capacità di carico utile del PSLV su voli successivi è stato ottenuto attraverso diversi mezzi: aumento del carico del propellente del motore a propellente solido del primo stadio e dei motori a propellente liquido di secondo e quarto stadio, miglioramento delle prestazioni del motore del terzo stadio ottimizzando cassa del motore e caricamento avanzato del propellente e impiego di un adattatore di carico utile composito di carbonio. Anche la sequenza di accensione dei motori strap-on è stata cambiata da due sequenze illuminate a terra e quattro illuminate ad aria alle attuali quattro sequenze illuminate a terra e due illuminate ad aria.
Nel PSLV-C5, l'adattatore metallico del terzo stadio è stato sostituito da quello costruito con compositi di carbonio. Inoltre, il secondo stadio del propellente liquido è stato fatto funzionare a una pressione della camera più alta per prestazioni migliori.
Nella sua configurazione attuale, il PSLV alto 44,4 metri, 294 tonnellate ha quattro stadi che utilizzano alternativamente sistemi di propulsione solidi e liquidi. Il primo stadio è uno dei più grandi booster di propellente solido al mondo e trasporta 138 tonnellate di propellente Hydroxyl Terminated Poly Butadiene (HTPB). Ha un diametro di 2,8 m. La cassa del motore è realizzata in acciaio Maraging. Il booster sviluppa una spinta massima di circa 4.762 kN. Sei motori strap-on, quattro dei quali accesi a terra, aumentano la spinta del primo stadio. Ognuno di questi motori strap-on a propellente solido trasporta nove tonnellate di propellente solido e produce una spinta di 645 kN.
Il secondo stadio impiega un motore Vikas costruito in modo autoctono e trasporta 41,5 tonnellate di propellente liquido - UH25 come combustibile e tetrossido di azoto (N2O4) come ossidante. Genera una spinta massima di circa 800 kN.
Il terzo stadio utilizza 7,6 tonnellate di propellente solido a base HTPB e produce una spinta massima di 246 kN. La cassa del motore è realizzata in fibra di poliammide. Il quarto e lo stadio terminale del PSLV ha una configurazione a doppio motore con propellente liquido. Con un carico del propellente di 2,5 tonnellate (mono-metilidrazina e ossidi misti di azoto), ciascuno di questi motori genera una spinta massima di 7,3 kN.
La carenatura del carico utile bulboso metallico di 3,2 m di diametro del PSLV è di costruzione isogridea e protegge il veicolo spaziale durante il regime atmosferico del volo. PSLV impiega un gran numero di sistemi ausiliari di stadio per la separazione dello stadio, la separazione della carenatura del carico utile e il disinserimento, ecc.
Il sistema di controllo PSLV comprende: a) Primo stadio; Controllo del vettore di spinta dell'iniezione secondaria (SITVC) per beccheggio e imbardata, propulsori di controllo di reazione per roll b) Secondo stadio; Gimbal del motore per beccheggio e imbardata e, motore di controllo della reazione del gas caldo per il controllo del rollio c) Terzo stadio; ugello flessibile per beccheggio e imbardata e PS-4 RCS per il controllo del rollio e d) quarto stadio; Gimbal del motore per beccheggio, imbardata e rollio e RCS on-off per il controllo durante la fase di costa.
Il sistema di navigazione inerziale nel vano attrezzature, che si trova in cima al quarto stadio, guida il veicolo dal decollo all'iniezione di veicoli spaziali in orbita. Il veicolo è dotato di strumentazione per monitorare le prestazioni del veicolo durante il volo. La telemetria PCM in banda S e i transponder in banda C soddisfano questo requisito. Il sistema di localizzazione fornisce informazioni in tempo reale per la sicurezza del volo e per la determinazione preliminare dell'orbita dopo l'iniezione del satellite in orbita.
Il Vikram Sarabhai Space Center (VSSC), Thiruvananthapuram, ha progettato e sviluppato PSLV. L'ISRO Inertial Systems Unit (IISU) di Thiruvananthapuram ha sviluppato i sistemi inerziali per il veicolo. Il Liquid Propulsion Systems Center, sempre a Thiruvananthapuram, ha sviluppato gli stadi di propulsione liquidi per il secondo e il quarto stadio del PSLV, nonché i sistemi di controllo della reazione. Il Satish Dhawan Space Center (SDSC), SHAR ha elaborato i motori solidi ed eseguito operazioni di lancio. ISTRAC ha fornito supporto di telemetria, tracciamento e comando.
Con sette lanci successivi di successo, PSLV si è dimostrato un veicolo affidabile per il lancio di satelliti di telerilevamento indiani. Inoltre, è stato utilizzato per il lancio di un satellite geo-sincrono, KALPANA-1. L'ISRO ha proposto di utilizzare il PSLV per la prima missione senza pilota sulla luna dell'India, Chandrayaan-1.
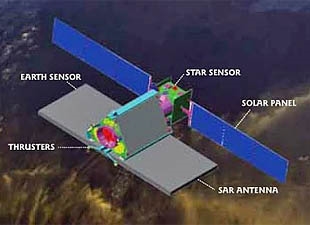
RESOURCESAT-1 trasporta tre telecamere come segue:
* Un scanner per immagini lineari ad alta risoluzione (LISS-4) che opera in tre bande spettrali nella regione visibile e nell'infrarosso vicino (VNIR) con una risoluzione spaziale di 5,8 metri e orientabile fino a + 26 gradi lungo il binario per ottenere immagini stereoscopiche e ottenere cinque giorni capacità di rivisitazione
* Una LISS-3 a media risoluzione che opera in tre bande spettrali in VNIR e una in banda a infrarossi a onde corte (SWIR) con una risoluzione spaziale di 23,5 metri
* Un sensore a campo largo avanzato (AWiFS) che opera in tre bande spettrali in VNIR e una banda in SWIR con una risoluzione spaziale di 56 metri.
RESOURCESAT-1 porta anche un registratore a stato solido con una capacità di 120 bit Giga per memorizzare le immagini riprese dalle sue telecamere che possono essere lette in seguito alle stazioni di terra.
Poco dopo la sua iniezione in orbita, i pannelli solari a bordo di RESOURCESAT-1 sono stati schierati automaticamente per generare l'energia elettrica necessaria per il satellite. Sono in corso ulteriori operazioni come la stabilizzazione a tre assi. La salute dei satelliti viene costantemente monitorata dal Centro di controllo dei veicoli spaziali a Bangalore con l'aiuto della rete ISTRAC di stazioni a Bangalore, Lucknow, Mauritius, Bearslake in Russia e Biak in Indonesia. Ulteriori operazioni sul satellite come il taglio dell'orbita, il controllo dei vari sottosistemi e, infine, l'accensione delle telecamere verranno eseguite nei prossimi giorni.
Con ISRO Satellite Center (ISAC), Bangalore, come Lead Center, RESOURCESAT-1 è stato realizzato con importanti contributi da Space Applications Center (SAC), Ahmedabad, Liquid Propulsion Systems Center (LPSC) a Bangalore e ISRO Inertial Systems Unit (IISU ), Thiruvananthapuram. ISTRAC è responsabile del funzionamento iniziale e in orbita di RESOURCESAT-1. La stazione di ricezione dati della NRSA (National Remote Sensing Agency) a Shadnagar vicino a Hyderabad riceve i dati da RESOURCESAT-1.
Una volta commissionato, RESOURCESAT-1 non solo continuerà i servizi di IRS-1C e IRS-1D, ma migliorerà anche i servizi di telerilevamento fornendo immagini con una migliore risoluzione spaziale e bande spettrali aggiuntive.
Fonte originale: comunicato stampa ISRO